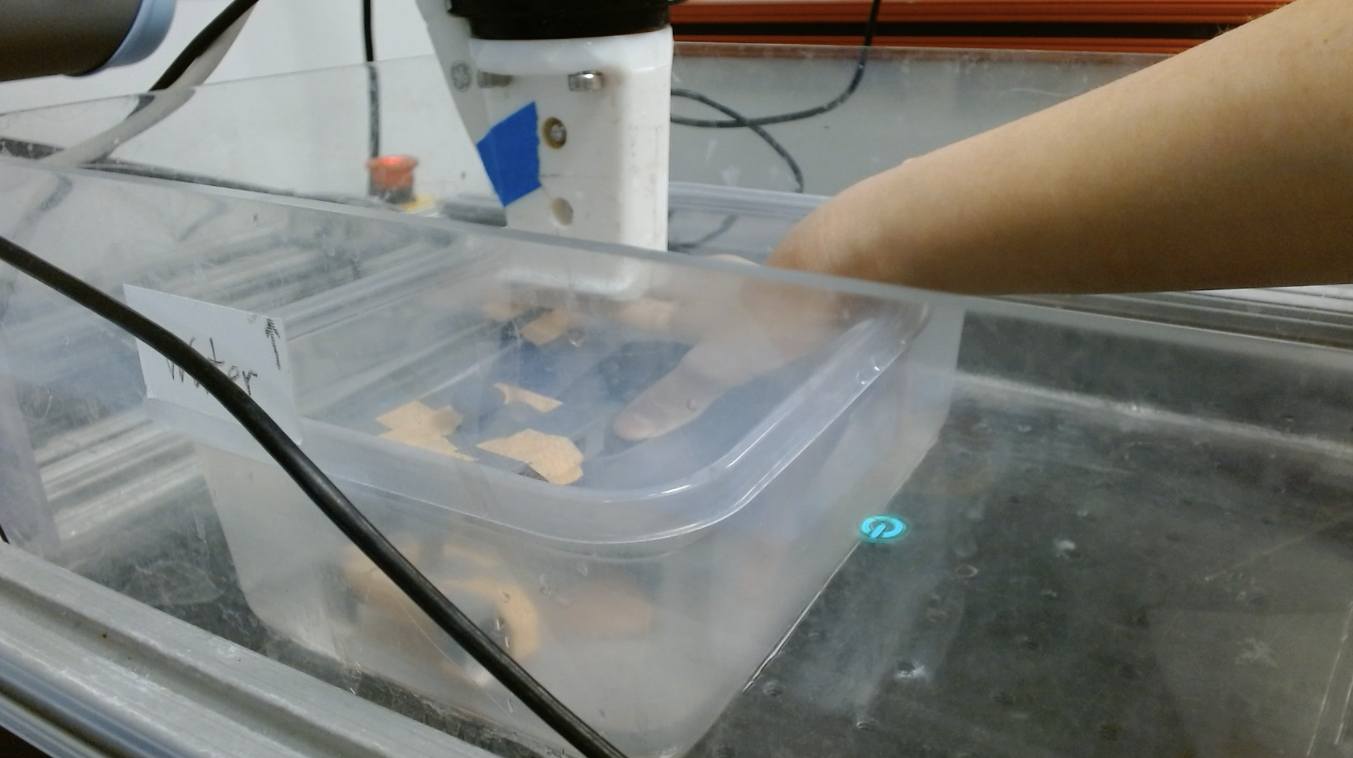
We developed a robotic integrated ultrasound system (RIUS) to advance autonomous medical imaging for arthritis detection, building upon prior research in robotics and optics. Guided by Professors Mark Draelos and Xueding Wang, the system integrates a UR3 robotic arm with a GE ultrasound device to autonomously scan a patient’s hand for early detection of arthritic conditions. (Poster for details)
Figure 1: RIUS conducting arc scan around subject's hand
The firmware for controlling the robotic arm and streaming ultrasound images was implemented using Python, C++, and associated libraries, enabling robust simulations and experimental setups. Inverse kinematics algorithms were employed to compute precise joint angles for each scan waypoint, while forward kinematics facilitated the 3D reconstruction of ultrasound images using MATLAB and Python-based computer vision techniques. A critical focus of the study was on calibrating the alignment between the robotic arm’s end effector and the ultrasound probe, ensuring accurate 3D imaging from multiple B-scans. The developed RIUS prototype demonstrates potential for enhancing the precision and efficiency of arthritis diagnosis through autonomous imaging technologies.
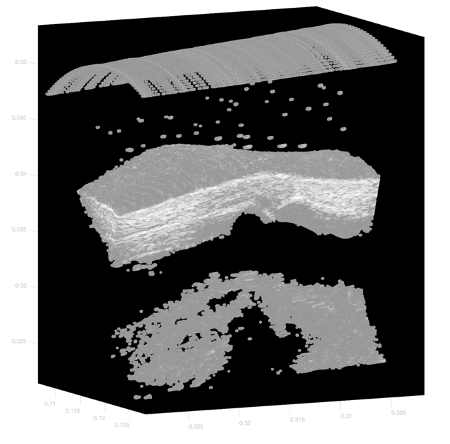
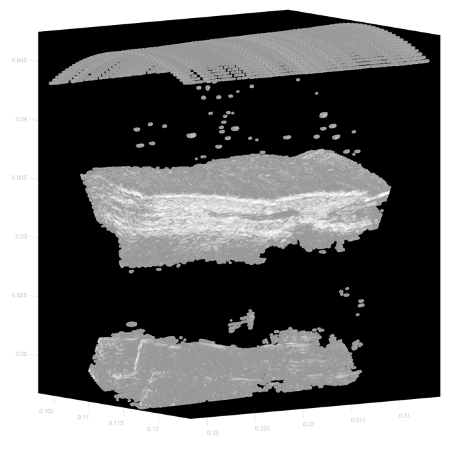
Figure 2: 3D reconstruction of multiple B-scans generated by Arc Scan of PIP jointFigure 3: 3D reconstruction of multiple B-scans generated by Arc Scan of DIP joint